RobotAssist
 New River Kinematics offers two educational software packages for free download: MoluCAD and RobotAssist. RobotAssist is a full-featured robot modeling and control package designed specifically for the Windows environments.
New River Kinematics offers two educational software packages for free download: MoluCAD and RobotAssist. RobotAssist is a full-featured robot modeling and control package designed specifically for the Windows environments.-
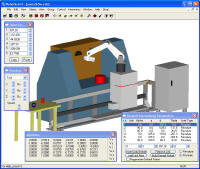
RobotAssist is a full-featured robot modeling and control package designed specifically for the Windows environments (95, 98, ME, NT, 2000, XP). RobotAssist's advanced graphics display engine includes a set of highly optimized display algorithms that enables Pentium-class processors to achieve graphics quality and high display rates that surpass many expensive workstation-based packages. These display algorithms and the associated parametric object databases are specifically tailored for modeling robotic devices and other industrial hardware.
-
-
RobotAssist includes the following capabilities:
-Trajectory Generation
-Advanced robust inverse kinematic solver solves even kinematically redundant manipulators.
-Resident, interpretive forth generation robot control language.
-Interference detection finds and illustrates interference areas.
-Unique socket connections facilitate distributed processing and remote control.
-Hardware-like teach pendant with joint, world, tool, and other user-definable coordinate bases.
-Ability to create, store, and recall robot motion sequences.
-Standard Windows® clipboard interface.
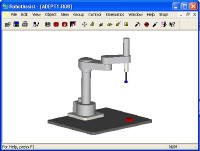
-Library of 60 robot models. Multiple, simultaneous views of one or several robots.
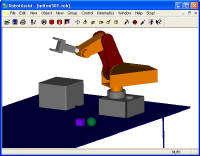
-Fully parametric shape primitives allow the user to quickly generate realistic robot and environment models.
-CAD import/export utilities.
-Advanced path generation algorithms with incorporate actual joint velocity and acceleration limits.
-General hardware control interfaces supported via the Robot-Link interface module.
-User access to advanced kinematic and control diagnostics such as actual joint position, velocity, and acceleration graphing, Jacobian evaluation, or robustness estimation.
-Convenient Denavit-Hartenberg kinematic descriptions of robot kinematic properties.
-Compressed model storage format to speed disk and network retrieval.
-Actuated peripheral devices, for modeling parts, feeders, conveyors, etc.
-Linkage modeling tools for depicting linkage-type actuators.
-Real-time dimensioning between moving objects.
-Optional Space-Ball interface allows control of both the robot-tool and the user-view.
-Extrinsic robot calibration functions place the robot in the work cell given 3 or more known touch-points.
Click here to download.